Diseño, Desarrollo e Implementación de un Ecosistema de Software Concurrente para la Integración Multi-Protocolo, Procesamiento Lógico en Tiempo Real y Visualización Táctica de Datos en Sistemas Navales de Control de Armas
Centro de Desarrollo Tecnológico Naval - Porgrama Sistemas de Armas (MVP SW CONSOLA BARRACUDA V2.0)
Planteamiento de la Problemática
A partir del análisis del Sistema de Control de Armas Naval FFS-RWS v2.0, se identificaron problemáticas clave que motivaron el desarrollo:
- Obsolescencia de FPGA (BARRACUDA V1.0): Arquitectura rígida limitando la modernización.
- Fragmentación de Protocolos: Inexistencia de un Digital Bridge centralizado para convergencia TCP, UDP y NMEA.
- Carencia de HMI Táctico Moderno: Ausencia de simbología militar (MIL-STD-2525) y falta de feedback loop visual claro para el operador.
- Falta de Soberanía: Dependencia de proveedores internacionales limitando el mantenimiento autónomo y exponiendo la seguridad naval.
Introducción
El proyecto BARRACUDA V2.0 moderniza el sistema naval FFS-RWS reemplazando hardware propietario obsoleto por un ecosistema de software soberano y concurrente que integra TCP, UDP y WebSocket para conectar operador y hardware crítico con latencias menores a 33 ms. Implementa validación de tramas, filtrado de joystick y una máquina de estados para controlar modos RWS, EOT y CMS con seguridad operacional, además de una HMI reactiva con radar táctico, telemetría y video en tiempo real. Desarrollado con metodología Scrum y tecnologías open-source, manteniendo la integridad de datos, baja latencia y bajo consumo de CPU, fortaleciendo la independencia tecnológica naval colombiana.
Objetivos, Justificación y Alcance
Métricas de Diseño y Dimensionamiento del Sistema
Objetivo General
Objetivo: Desarrollar un ecosistema de software concurrente de alta fidelidad para consolas navales, actuando como nodo central de procesamiento, integración visual y Gateway de comunicaciones (UDP/TCP) vía LAN; orquestando en tiempo real tramas de datos Ethernet de diversos sistemas y sensores integrados en sincronización directa con el Gabinete de Interfaz (IC).
Objetivos Específicos
- Desarrollar un motor de comunicaciones concurrente en Node.js que orqueste la ingesta multi-protocolo de datos periféricos y gestione el enlace persistente y determinístico con el Gabinete de interfaz (IC) vía TCP.
- Implementar una ingeniería de lógica y cálculo encargada de la validación de integridad (XOR), máquinas de estado para modos de trabajo y algoritmos matemáticos de transformación de variables físicas en datos tácticos.
- EConstruir una interfaz de misión crítica mediante Svelte y Vite que traduzca la complejidad de los procesos de servidor en una representación visual reactiva y controlable, permitiendo la interacción bidireccional del operador.
Alcance General del Proyecto
El proyecto aborda el procesamiento integral desde la lectura de periféricos hasta el frente visual:
- Funcional: Construcción de Backend concurrente TCP/UDP, HMI Svelte/Vite con SVG Radar (PPI) estabilizado. Incorporación de StationManager y Deadzone ±5.
- Tecnológico: Stack de JavaScript puro/Node.js, WebSocket en tiempo real. Empaquetado industrial mediante Electron v30. Distribución final .deb.
- Excluido: Ninguna modificación del Firmware FPGA (Desvinculación del proveedor), ni fabricación de componentes físicos o gabinetes.
Justificación
EL aplicativo de Software CONSOLA BARRACUDA V2.0 se justifica como una solución de ingeniería que desacopla la lógica de control del hardware mediante tecnologías web modernas, permitiendo integrar comunicaciones UDP, TCP y WebSocket con alto rendimiento y cálculos en milisegundos bajo estándares militares. Su arquitectura concurrente basada en eventos sustituye sistemas rígidos con FPGA por plataformas flexibles y actualizables, reduciendo dependencia extranjera y costos al usar hardware comercial. Operacionalmente mejora la conciencia situacional y reduce errores humanos con una interfaz táctica unificada y baja latencia, mientras que a nivel institucional fortalece la soberanía tecnológica del CEDNAV y la Armada al mantener conocimiento e IP en el país. Además, aporta valor académico al generar documentación y aplicar patrones de diseño y metodologías ágiles en un entorno real de defensa naval.
Metodología de Desarrollo
Scrum Ágil - Criterios y Trazabilidad
Scrum - Ingeniería de Desarrollo Iterativo
Se integró una adaptación rigurosa de metodologías ágiles dividiendo la construcción del MVP en ciclos iterativos (Sprints).
- 18 Historias de Usuario (HU).
- 65 Tareas de ingeniería detalladas.
- Documentadas con criterios BDD Gherkin.(Desarrollo Guiado por el Comportamiento)
- Sprint 1: Análisis, Requisitos y Arquitectura (Completado).
- Sprint 2: Desarrollo Backend y HMI Core (Completado).
- Sprint 3: Integración y Funcionalidades Completas (En progreso).
- Sprint 4: Testing, Despliegue y Documentación (Planeado).
Diagrama de Gantt
Abrir Cronograma CompletoArquitectura y Patrones de Diseño
Ingeniería de Software Aplicada
Capas de Software
- Capa Presentación (HMI): Svelte JS, renderizado SVG, Video Canvas.
- Capa Aplicación: Node.js `server.js` (Event Bus/Heartbeat) que orquesta WebSockets.
- Capa Dominio: Lógica central de Control Naval, Máquina de Estados (FSM) y Decodificador Binario (Protocolos/LRC).
- Capa Infraestructura: Drivers Sockets UDP y TCP para IC y periféricos. Motor de Video H.264 (FFmpeg).
Patrones de Diseño Integrados
- Modelo-Vista-Contralor (MVVM): Binding bi-direccional directo sin saturar con Virtual DOM, ideal para equipos navales limitados.
- Patrón Observer y Event-Driven: Emisor de eventos Node.js y WebSocket para actualizar Pistas CMS y Sensores sin cuellos de botella jerárquicos.
- Patrón Singleton: Utilizado en la interfaz de Puerto Serial TCP y StationManager para no replicar recursos críticos.
Lógica de Procesamiento y Flujo de Datos
Detalle Exhaustivo Paso a Paso desde la Infraestructura al Frontend
1. Motores de Lógica
- server.js: Coordina los 5 microservicios (Backend Bridge).
- BinaryProtocolService: Compilador binario (generateFrame, parseFrame, Checksum XOR).
- Motores de Red: UDPService y TCPService (Gestor industrial de sockets).
- Radar.svelte: Motor Matemático y SVG (Transformaciones polares y rotación).
2. Protocolos de Conexión
- Fase 1 (Watchdog): Desconexión forzada si el IC Gabinete de Interfaz pierde el pulso (1200ms -> "SEÑAL IC PERDIDA").
- Fase 2 (IP Learning): Detección automática y enganche de IP operativa operativa desde Broadcast (255.255.255.255).
- Fase 3 (XOR Integridad): Validación bit a bit en TX/RX para prevenir datos basura.
3. Procesamiento y Renderizado
- Joystick (Deadzone): Suprime ruido mecánico filtrando valores abs <= 5.
- Máquina de Estados Finitos (FSM) de Trabajo: Máquina que evalúa OPTRO, RWS y CMS para generar el código Hex correcto para servomotores.
- Precisión Matemática (SVG): Ángulo PPI = normalizeAngle(target + shipHeading). Distancia = (range / max) * 50.
- Compensación de Rumbo: Contenedor 'radar-circle' rota inversamente usando la telemetría Gyro de NMEA.
- Simbología : Rotación inversa compensada para mantener la verticalidad ("simbología derecha").
4. Motores de Concurrencia
- Video Táctico: Orquesta FFmpeg por UDP en base al ConsoleNum (Ej: 37511).
- CMS: Pistas tácticas inyectadas instantáneamente dibujadas por Svelte stores (buffers de 42 bytes).
- Feedback Físico: UDP 5501 para encender colores físicos de LEDs de hardware.
Requisitos y Fase de Pruebas MVP
Validación Exhaustiva del Producto Mínimo Viable
Requerimientos
Funcionales (RF):
- RF1: Adquisición de datos en tiempo real desde puertos UDP (45xx, 55xx, 80xx).
- RF2: Sincronización bidireccional con el Gabinete de Interfaz (IC) vía TCP.
- RF3: Serialización de comandos en tramas binarias de 29 bytes (TX).
- RF4: Deserialización de telemetría desde tramas de 31/33 bytes (RX).
- RF5: Gestión dinámica de estaciones (Estribor, Babor, Popa).
- RF6: Control de energización de sistemas externos (EOT/RWS).
- RF7: Procesamiento de NMEA (GPS, Gyro, Pitch/Roll).
- RF8: Visualización de video streaming UDP/H.264.
No Funcionales (RNF):
- RNF1 (Determinismo): Ciclo de envío de latido (Heartbeat) constante cada 100ms.
- RNF2 (Latencia): Procesamiento interno < 10ms; Latencia punta a punta < 33ms.
- RNF3 (Seguridad): Validación de integridad XOR en cada trama de comunicación.
- RNF4 (Disponibilidad): Reconexión automática (Watchdog) para enlaces caídos.
- RNF5 (Interfaz): Diseño HMI militar (MIL-STD-2525) para tácticas.
Resultado de Pruebas MVP
| Criterio de Evaluación | Valor Esperado | Obtenido | Estado |
|---|---|---|---|
| Latencia TX/RX Punta-Punta | < 33ms | 24-33ms | Éxito |
| Integridad de Tramas Binarias | 100% (XOR OK) | 100% | Éxito |
| Ciclo de Heartbeat TCP | 100ms ± 10ms | 100ms ± 2ms | Éxito |
| Reconexión de Red Tras Falla | < 5 segundos | 2.5 segundos | Éxito |
| Consumo de CPU (Node.js) | < 40% | 15% | Éxito |
* Documentación granular del Testing RESERVADA - ARMADA NACIONAL.
» ver - Captura de pruebas de funcionamiento
» ver - Captura de pruebas de tráfico de TCP/IP - UDP
Diagramas de Modelado y Arquitectura UML
Especificación Formal del Software
Seleccione el diagrama visual renderizado a partir de los archivos del proyecto o acceda a la versión estática en nube / local.
Imágenes e Históricos (Repositorios de Referencia)
Puede abrir los siguientes enlaces oficiales del proyecto que complementan este reporte:
- » Abrir Documento Técnico Completo (Reporte del MVP Original)
- » Diagrama componentes - https://www.figma.com/
- » Mapa MAPA_STAKEHOLDERS_BARRACUDA
- » Diagrama Flujo Sw Consoloa Barracuda v2.- https://www.miro.com/
- » Diagrama Clases - https://www.miro.com/
- » Diagrama Arquitectura - https://www.miro.com/
- » Diagrama Despliegue - https://www.miro.com/
Despliegue y MVP Online
Entornos de Producción y Ejecución
Ambiente de Verificación
El producto puede ser operado formalmente en terminales industriales (Estribor, Popa, Babor) empaquetado bajo Electron v30.
Concesión Backend TCP: 60XX
Demultiplexor de Video: 375XX
Gateway WebSocket: 80XX
{kind=link}
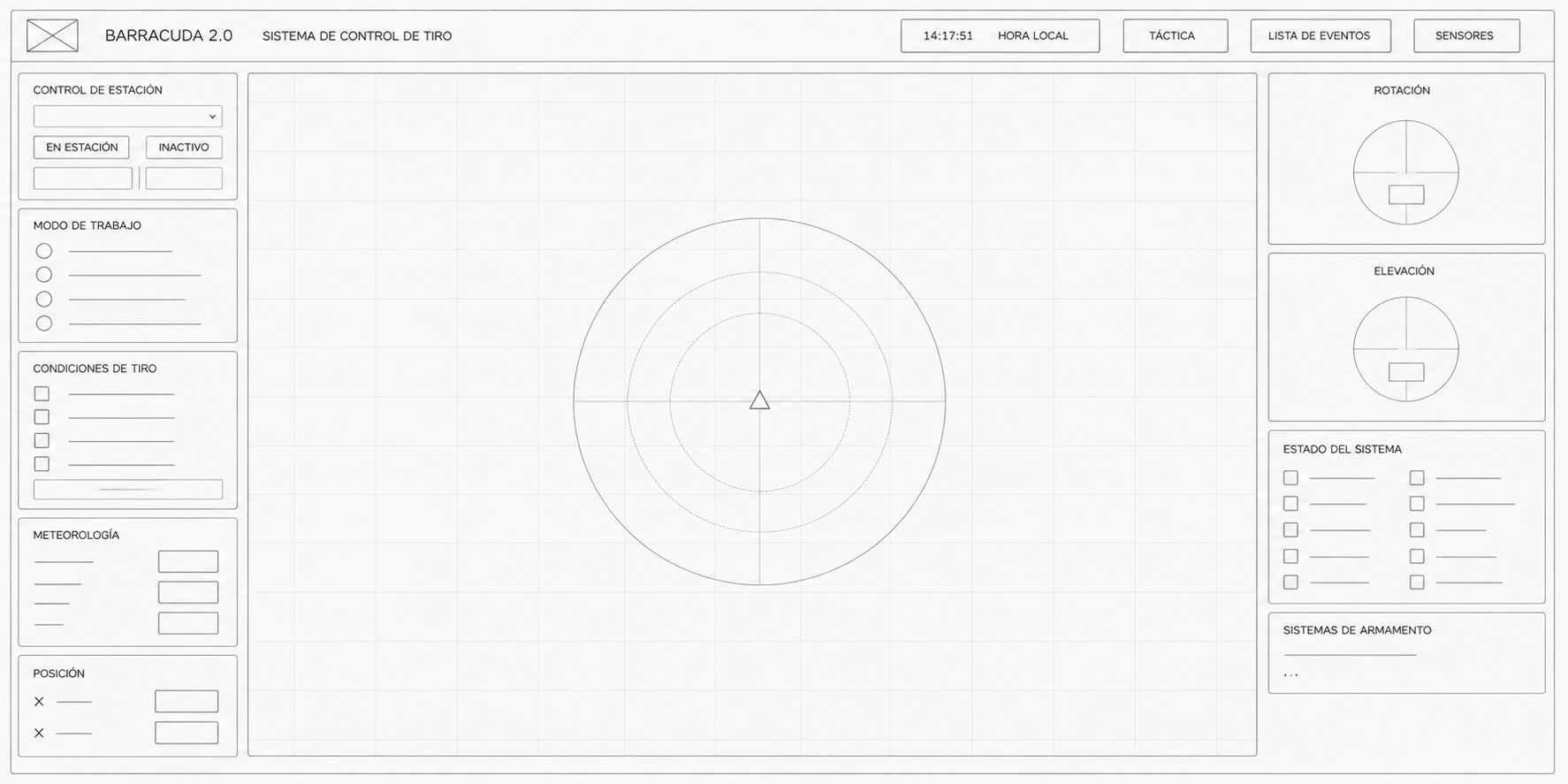
-Acceder a diseño alta fidelidad
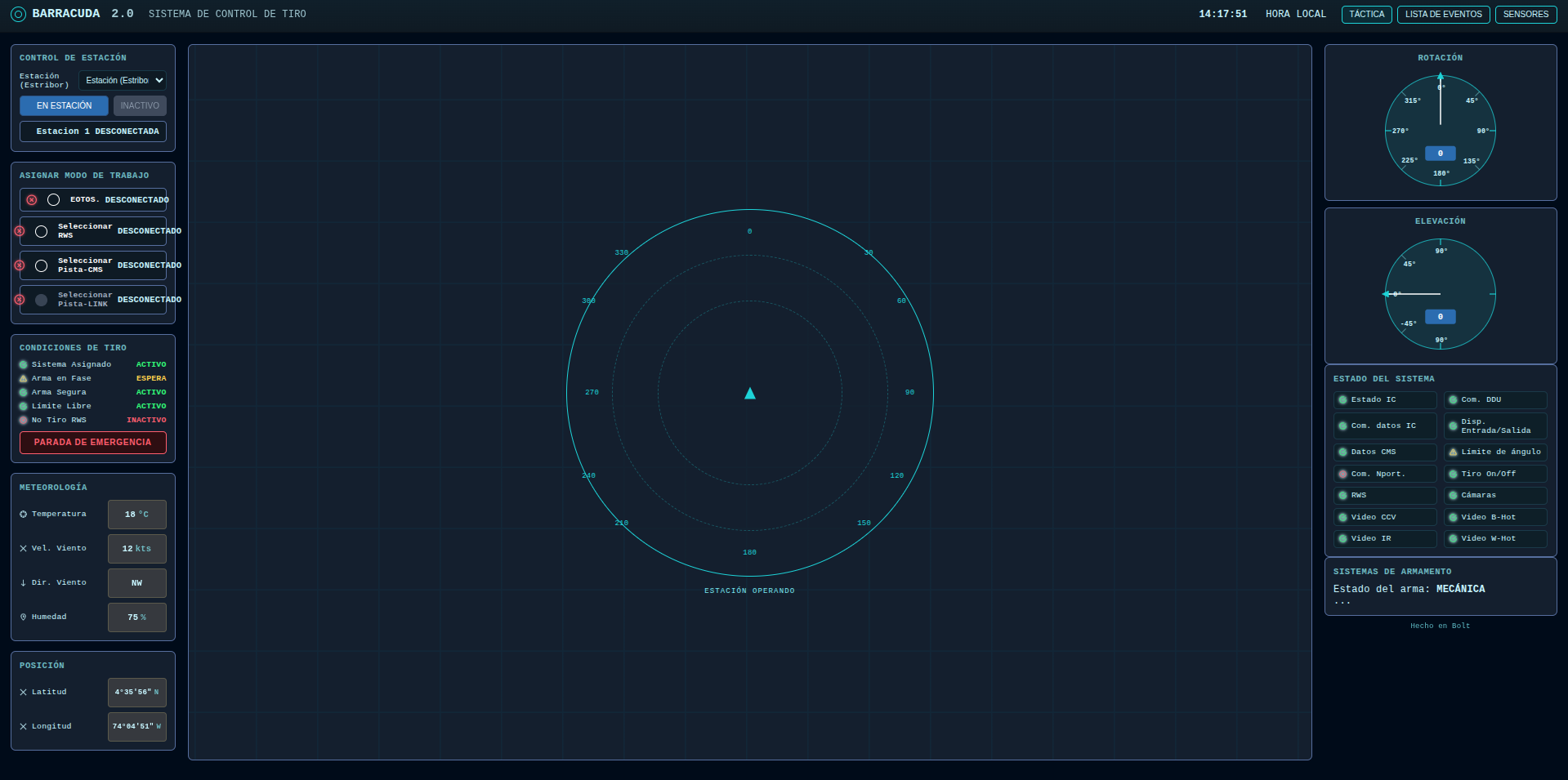{kind=link}
-Acceder a diseño intermedio Demo del MVP
-Acceder a Terminal Demo del MVP
-Acceder a diseño actual acuerdo parametros de integración
{kind=link}
-Acceder a vista de estructura del proyecto
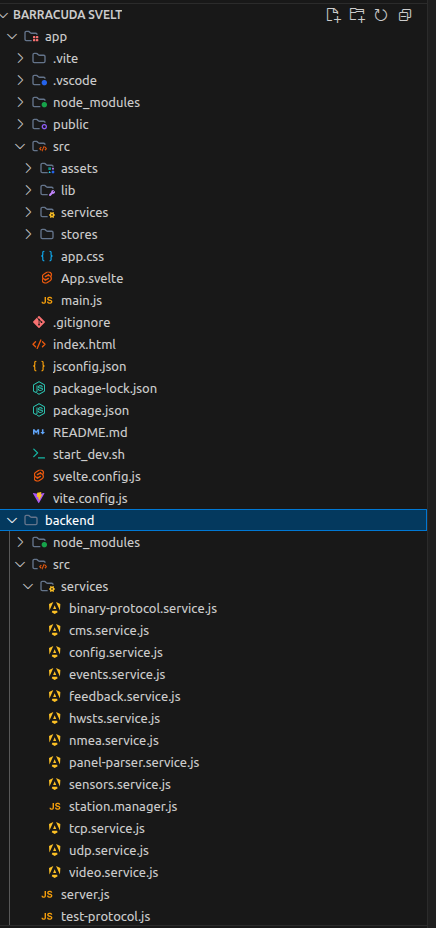{kind=link}
-Acceder a MIL_STD_2525E.pdf